조천식모빌리티대학원 공승현 교수 연구팀 : K-Radar: 4D Radar Object Detection Dataset and Benchmark... - 「NeurIPS」
우리 학교 조천식모빌리티대학원 공승현 교수 연구팀이 지난달 20일 세계 최초로 악천후 상황에서도 안정적인 자율주행을 가능하게 하는 4D (XYZ+Doppler) 레이더(Radar) 인공지능 기술을 개발했다고 밝혔다. 백동희 박사과정과 공승현 교수가 공동 제1 저자로 참여한 이번 연구는 오는 12월에 열리는 세계적인 인공지능 컨퍼런스 뉴립스(NeurIPS)에서 발표될 예정이다.
악천후에서의 자율주행차
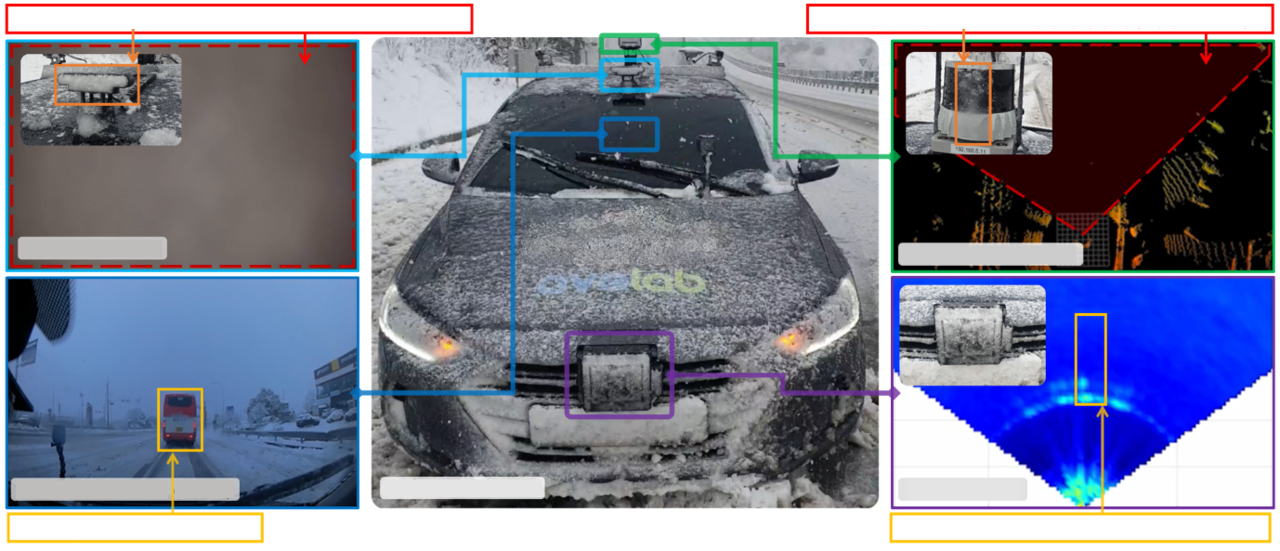
현재 전 세계적으로 개발되고 있는 자율주행 자동차는 주로 카메라 영상과 라이다(LiDAR)에서 얻어진 점구름 형태의 데이터를 인공지능 신경망으로 처리해 주변의 객체를 인식한다. 하지만 각각 적외선과 가시광선을 이용하는 라이다와 카메라는 악천후 상황에서 빗방울이나 눈송이를 투과하여 주변 환경을 인식할 수 없다. 라이다의 경우에는 적외선이 물체에 반사되어 돌아오는 시간을 측정하여 물체의 위치 좌표를 얻는 시스템이기 때문에 자동차 외부에 설치해야 한다. 이때 악천후 상황이라면 전방에 주행하는 차들이 만드는 흙먼지 섞인 물보라로 인해 라이다 표면이 쉽게 더러워지므로 전방 객체의 탐지가 원천적으로 불가능해진다. 따라서 기존에 이용하던 방식처럼 라이다와 카메라만 이용한다면 악천후 상황에서 주변 객체를 인지할 수 없어 매우 위험한 주행이 된다.
최근에는 물체까지의 거리, 높이, 도플러 주파수, 신호의 세기를 측정할 수 있는 고해상도의 4D 레이더가 상용화되고 있어 세계적으로 4D 레이더에 대한 다양한 연구가 진행되는 추세다. 그러나 4D 레이더의 중요성이 익히 알려져 왔음에도 불구하고 4D 레이더를 자율주행차에 적용하기 위해 필요한 인공지능에 관한 연구는 거의 이루어지지 않았다. 인공지능 개발에 필요한 데이터셋이 충분히 구축되지 못했기 때문이다.
K-레이더와 텐서 형태의 데이터셋
이에 연구팀은 다양한 날씨와 교통 상황에서 수집된 방대한 데이터셋인 KAIST-레이더를 구축하고 공개했다. 데이터는 정확히 동기화된 카메라와 라이다, 4D 레이더로 수집되었으며, 3D bounding box로 객체의 위치가 표시된 데이터만 3만 5천 장, 13TB에 이르는 많은 양이다.
특히 KAIST-레이더는 기존에 이용되던 점구름 형태가 아닌 텐서(Tensor) 형태의 데이터셋을 사용했다는 점이 특징적이다. 레이더는 전파를 사용하므로 신호에 잡음이 많이 발생한다. 이 때문에 필터를 통해 물체에서 반사되어 돌아오는 신호 중 특정 수치 아래의 신호들을 걸러낸다. 이렇게 걸러진 신호들을 3차원상에 점으로 표시한 데이터셋이 포인트 클라우드다. 그런데 레이더 포인트 클라우드는 필터링 효과가 커서 실제로 존재하는 물체에 대한 신호까지 지워 버리는 경우가 많다. 반면 텐서 형태의 데이터를 이용하면 잡음 수준의 미세한 측정치까지 온전히 담을 수 있다.
연구팀은 이렇게 축적된 데이터셋을 이용해 개발한 4D 레이더 인공지능 신경망(RTN4D)의 학습을 진행했다. 그 결과 자체적으로 개발한 신경망을 통해 악천후나 복잡한 교통 상황에서 객체를 판별하고, 동시에 객체의 위치와 주행 방향까지 모두 정확하게 추정하는 경우가 62.5%에 달했다. 이는 20%대였던 기존 3D (XY+Doppler, 높이 정보 부재) 레이더의 인식률과 비교하면 획기적인 수치다.
기술 공개부터 응용 전망까지
연구팀은 이번 연구를 통해 구축한 KAIST-레이더와 RTN4D에 더하여 기술의 성능을 자체적으로 평가할 수 있도록 레이더용 인공지능 신경망 개발 플랫폼과 벤치마크를 함께 공개했다. 데이터와 플랫폼을 공유하여 4D 레이더에 관한 인공지능 연구를 장려하기 위해서이다. 현재 연구팀은 자율주행차에서 4D 레이더와 카메라를 융합해서 이용하거나, 4D 레이더를 이용한 더욱 빠르고 정확하게 360o 주변 객체 인식과 도로 상황을 파악하는 기술 개발에 주목하고 있다.
이번 연구에 주도적으로 참여한 백동희 박사과정은 기존에 시도해본 적이 없는 분야를 연구하며 확신이 서지 않는 순간도 많았지만, 교수님께서 이끌어 주시는 방향을 믿고 나아가서 좋은 성과를 낼 수 있었다며 감사를 표했다. 공 교수는 이번 연구를 통해서 기존 연구가 없는 생소한 분야를 연구하게 될 때는 막막함과 실패에 대한 두려움도 있지만, 가능성이 있다고 판단되면 용기를 잃지 말고 추진하기를 바란다고 전했다.