우리 학교 휴머노이드로봇연구센터 오준호 교수팀이 개발한 인간형 로봇 HUBO가 걸음마에서 벗어나 이젠 달릴 수 있게 되었다. 일본 혼다의 아시모(ASIMO)와 도요타의 파트너(Partner)에 이어 세계 3번째로 달리는 로봇을 개발한 것이다. 달리는 HUBO는 HUBO2라는 이름으로 지난 10월, 미국과 싱가포르에 연구 장비 형태로 판매되었다. 국산 로봇 휴보, 그 기술력과 작동 원리에 대해서 알아보기 위해 휴머노이드로봇연구센터를 방문했다
인간형 로봇 개발, 활발히 진행 중
휴머노이드 로봇(Humanoid Robot)은 머리, 몸통, 팔, 다리 등의 인간의 신체와 유사한 형태를 가진 로봇이다. 최초의 휴머노이드 로봇은 1973년 일본 와세다대학교에서 개발한 와봇-1(WABOT-1)이다. 와봇-1은 두 발로 걸을 수 있지만, 단지 몇 걸음만 움직일 수 있다. 이후, 일본 혼다사에서는 계단을 오르내릴 수 있고 활동 영역도 다양한 아시모를 개발했다.
우리나라 최초의 휴머노이드 로봇은 HUBO(이하 휴보)로, 2004년 12월 우리 학교 휴머노이드로봇연구센터(이하 휴보 랩) 오준호 교수팀이 개발했다. 휴보는 외부의 소리와 사물을 인지할 수 있어 장애물을 피해 걸어 다닐 수 있다. 또한, 다섯 손가락을 독립적으로 움직일 수 있어 섬세한 손동작도 가능하다.
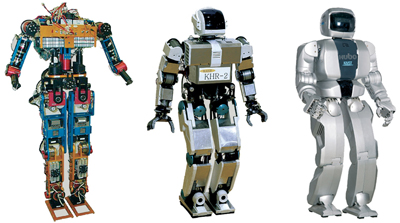
(우) 휴보(KHR-3) / 국내 최초의 휴머노이드 로봇. 손가락 5개를 따로 움직여 가위바위보를 할 수 있다. 음성을 인식할 수도 있다
실험 통해 최적의 걸음새를 연구
로봇은 스스로 걸음새를 터득할 수 없으므로 기준이 되는 보행 패턴을 미리 지정해주어야 한다. 휴보 랩 허정우 학우(기계공학전공 박사과정)는 “이론과 실험을 바탕으로 시행착오를 겪으며 로봇이 가장 효과적으로 걸을 수 있는 보행 패턴을 연구한다”라며 “이는 어린아이가 자라면서 어른들이 걷는 것을 보고 배우는 것과 같은 원리다”라는 것을 언급하며 보행 패턴 연구를 설명했다.
일반적으로 인간형 로봇 대부분은 무릎을 굽혀 자세를 낮춘다. 휴보도 보행 시에는 원래 키보다 40mm 낮추어 걷는다. 자세를 낮출수록 최대 보폭 거리를 늘릴 수 있으며, 무게 중심을 변화시켜 보행 주기를 줄일 수 있기 때문이다.
센서로 모멘트 측정해 넘어짐 막아
기준이 되는 보행 패턴이 형성되더라도 보행의 안정성을 보장할 수 없다. 이에 로봇의 보행을 제어할 수 있는 특별한 기능이 필요하다. 휴보는 보행 패턴 제어 알고리즘을 사용해 보행을 제어한다. 보행 패턴 제어 알고리즘은 단순 도립진자 모델을 적용해 골반과 몸통의 모멘트를 0으로 맞추는 알고리즘이다. 단순 도립진자 모델이란 기존의 진자 모델이 지면 아래 방향으로 향하는 것과 달리 진자를 지면 위 방향으로 향하게 설치한 모델을 말한다. 로봇이 지면에 서있는 모습을 생각하면 쉽게 이해할 수 있다.
로봇이 걸을 때, 지면의 기울기 때문에 특정 방향으로 몸통이 기울어질 수 있다. 몸통이 기울어지게 되면 로봇은 쓰러진다. 이를 막기 위해 휴보는 관성 센서를 이용해 매 보행 주기마다 몸통의 회전모멘트를 감지한다. 몸통의 회전모멘트를 측정하면 지면의 기울어진 정도를 알 수 있고, 골반을 기울여진 반대편으로 조금씩 움직여주면 넘어지지 않고 걸을 수 있다. 모멘트 측정에 쓰이는 센서는 좁은 관절에도 쉽게 설치를 할 수 있어야 한다. 하지만, 조그마하면서도 정확한 센서 하나를 만드는 데에는 상당한 시간이 걸린다. 현재 휴보 랩에서는 모멘트 측정에 쓰이는 효율성 높은 센서를 개발하는 데 주력하고 있다.
다가올 미래의 중심 기술이 될 것
휴머노이드 로봇 구현기술은 인간친화형 로봇 시스템을 구축할 수 있는 미래형 핵심 기반기술이다. 이 기술은 한 분야에 근간을 둔 기술이 아니라, 기계, 전자, 전산, 생명공학 등 다양한 학제적 특징을 가지고 있다.
관련 분야 종사자들은 다가오는 미래에는 전시, 교육, 가정, 산업 등 다양한 분야에서 지능형 로봇이 적용될 것으로 전망한다. 오 교수는 “현재 로봇 분야가 정부의 주도로만 이루어지고 있다”라며 “대기업들도 로봇산업을 미래 전략산업으로 인식하고 투자에 참여해야 한다”라고 휴머노이드 로봇 기술 연구의 중요성을 설명했다.